╚²ŠSųžĮ©Į©─Ż▄ø╝■

ś╦(bi©Īo)║ׯ║ VisualSFM ╚²ŠSųžĮ©▄ø╝■ ╣┘ŠW(w©Żng)Ż║http://www.szqmgyl.com
ĪČVisualSFMųą╬─░µĪĘ╩Ūę╗┐Ņą┼ŽóĮMĮ©ŅÉ▄ø╝■Ż¼ų¦│ų╚²ŠSųžĮ©Ż¼▓óŪęų¦│ųWindows32/64ŽĄĮy(t©»ng)Ż¼┐╔ęįų▒Įė▀M(j©¼n)ąą─ŃĄ─łDą╬▓┘ū„Ż¼īó2DłDą╬▀M(j©¼n)ąąį┘┤╬ŠÄ▌ŗŻ¼ų¦│ųČÓĘN▄ø╝■Ė±╩ĮŻ¼┐╔ęįų▒Įė┤“ķ_ŠÄ▌ŗŻ¼Ųš═©łDą╬łDŽ±╝┤┐╔▀M(j©¼n)ąąą▐Ė─ĪŻ
VisualSFM╩Ūę╗┐Ņ╩«ĘųÅŖ┤¾Ą─SFM╚²ŠSųžĮ©▄ø╝■Ż¼╩╣ė├ĘĮĘ©ĘŪ│Ż║åå╬Ż¼═Ļ╚½╔Ą╣Ž╗»▓┘ū„ĪŻę╗éĆ╩╣ė├▀\äė╗ųÅ═(f©┤)ĮY(ji©”)śŗ(g©░u)Ż©SFMŻ®üĒ▀M(j©¼n)ąą3Dł÷Š░ųžĮ©Ą─GUI│╠ą“ĪŻŽ▓ÜgĄ─┼¾ėč┌sŠoüĒŽ┬▌d¾w“×░╔ŻĪ
┐╔ęįÄ═ų·─·╩╣ė├SFM▀M(j©¼n)ąą╚²ŠSųžĮ©Ż¼└¹ė├▓óąąėŗ╦ŃĄ─Ė▀ą¦ęĢėX╚²ŠSł÷Š░ųžĮ©│╠ą“Ż¼└¹ė├ČÓ║╦▓óąą╠žš„Öz£yŻ¼╠žš„Ųź┼õš{(di©żo)š¹Ż¼╦┘Č╚ĘŪ│Ż┐ņĪŻ
▀@éĆųžĮ©ŽĄĮy(t©»ng)╝»║Ž┴╦║▄ČÓĖ▀ą¦Ą─▓óąą╠Ä└Ē│╠ą“└²╚ńŻ║ SIFT on GPU(SiftGPU),Multicore Bundle Adjustment, andTowards Linear-time Incremental Structure from Motion.
▀@éĆVisualSFMŽĄĮy(t©»ng)▀\ąąą¦┬╩ĘŪ│ŻĖ▀ĪŻ
1.šę│÷Ė„ÅłłDŲ¼ųąĄ─╠žš„³cŻ¼▀M(j©¼n)ąąā╔ā╔Ųź┼õŻ╗
ę¬Ū¾─▄ē“Š½┤_ūRäe╬’¾wĄ─Šų▓┐╠žš„Ż¼▓óŪę▀M(j©¼n)ąą┐ņ╦┘£╩(zh©│n)┤_Ą─Ųź┼õĪŻ¼F(xi©żn)│Żė├Ą─╦ŃĘ©╩Ūė╔DacidLowe╠ß│÷Ą─SIFTĘĮĘ©ĪŻ
2.Ė∙ō■(j©┤)Ųź┼õĮY(ji©”)╣¹Ż¼└¹ė├╔õė░Č©└Ēėŗ╦ŃĄ├ĄĮŽÓÖC╬╗ų├Ą╚ł÷Š░ą┼ŽóŻ╗
┤╦▓ĮėųĘQ▀\äė╗ųÅ═(f©┤)ĮY(ji©”)śŗ(g©░u)Ż©StructurefromMotionŻ®Ż¼╗“ŽĪ╩ĶųžĮ©Ż©SparseReconstructionŻ®ĪŻĮY(ji©”)╣¹Ą─║Ō┴┐ś╦(bi©Īo)£╩(zh©│n)ūóęŌ╩Ū£╩(zh©│n)┤_ąįŻ¼¼F(xi©żn)│Żė├╩Ū╗∙ė┌Lecenberg-Marquardt╦ŃĘ©Ą─BundlerĪŻ
3.▀\ė├ł÷Š░ą┼Žó┼cįŁ╩╝ššŲ¼Ż¼Ą├ĄĮššŲ¼ųą╬’¾wĄ─3D³cįŲŻ╗
┤╦▓ĮėųĘQ├▄╝»ųžĮ©Ż©DenseReconstructionŻ®ĪŻ▀\ė├ČÓęĢ┴ó¾wųžĮ©Ż©Multi-viewStereoReconstructionŻ®Ż¼Ą├ĄĮ3D³cįŲĪŻ³cįŲ┘|(zh©¼)┴┐╩▄ĄĮ╠Ä└ĒłDŽ±Š½Č╚Ą─ł╠(zh©¬)ąąą¦┬╩ĪóųžĮ©Š½Č╚║══Ļš¹ąįė░ĒæŻ¼─┐Ū░ūŅ║├Ą─╦ŃĘ©╩ŪPMVSĪŻ
4.Ė∙ō■(j©┤)3D³cįŲśŗ(g©░u)Į©3D─Żą═Ż╗
īó³c▀B│╔├µŻ¼▓┼┐╔į┌ę╗░Ń╚²ŠSĮ©─Ż▄ø╝■ųą╩╣ė├ĪŻ¼F(xi©żn)│Żė├Ą─╩Ū▓┤╦╔▒Ē├µųžĮ©╦ŃĘ©Ż©PossionSurfaceReconstructionŻ®ĪŻ
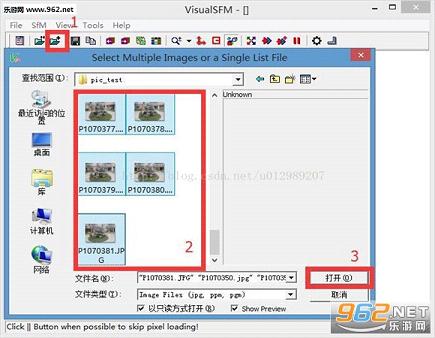
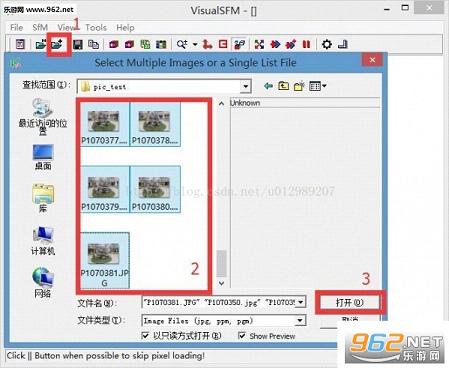
1.ūx╚Ī╦∙ąĶĄ─ššŲ¼Ż╗
³cō¶Ī░openMultipleImagesĪ▒░┤ŌoŻ¼▀xō±╦∙ąĶĄ─łDŲ¼Ż©▀\ė├shift▀x╚ĪŻ®Ż¼į┘³cō¶Ī░openĪ▒Ż¼╚ńŽ┬łD╦∙╩ŠĪŻ
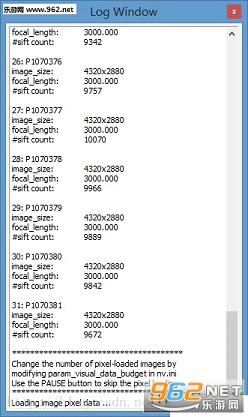
2.į┌TaskViewerwindowųą┐╔ęį┐┤ĄĮ╠Ä└ĒĄ─▓Į¾E╝░▀M(j©¼n)Č╚Ż¼╚ńŽ┬łDĪŻ
3.Ųź┼õššŲ¼ų«ķgĄ─╠žš„³cŻ╗
³cō¶Ī░ComputeMissingMatchesĪ▒Ż¼╚ńŽ┬łDĪŻ

3.▀M(j©¼n)ąąŽĪ╩ĶųžĮ©Ż╗
³cō¶Ī░Compute3DReconstructionĪ▒Ż¼╚ńŽ┬łDĪŻ

ĮY(ji©”)╣¹╚ńŽ┬łDŻ║

4.▀M(j©¼n)ąą├▄╝»ųžĮ©Ż╗
³cō¶Ī░RunDenseReconstructionĪ▒Ż¼╚ńŽ┬łDĪŻ

▀xō±ę╗éĆ╬─╝■Ę┼ų├īóę¬äō(chu©żng)Į©Ą──Żą═Ż¼╚ńŽ┬łD

īŻśI(y©©)Ą─ė╬æ“Ž┬▌dĪóŠC║ŽķT涊W(w©Żng)šŠ
Copyright 2009-2016 www.szqmgyl.com ░µÖÓ(qu©ón)╦∙ėą
ȧICPéõ17018784╠¢-1
 ČČę¶Č╠ęĢŅlappv37.1.0 ūŅą┬░µ
░▓ū┐ė░ę¶ęĢ┬Ā / 315.8M /
ČČę¶Č╠ęĢŅlappv37.1.0 ūŅą┬░µ
░▓ū┐ė░ę¶ęĢ┬Ā / 315.8M /  Ų┤ČÓČÓapp╣┘ĘĮ░µv7.88.0 ░▓ū┐░µ
░▓ū┐┘Å╬’ā×(y©Łu)╗▌ / 24.2M /
Ų┤ČÓČÓapp╣┘ĘĮ░µv7.88.0 ░▓ū┐░µ
░▓ū┐┘Å╬’ā×(y©Łu)╗▌ / 24.2M /  ąĪ╝tĢ°app╣┘ĘĮ░µv8.84.0 ╣┘ĘĮ░▓ū┐░µ
░▓ū┐┴─╠ņ╔ńĮ╗ / 126.1M /
ąĪ╝tĢ°app╣┘ĘĮ░µv8.84.0 ╣┘ĘĮ░▓ū┐░µ
░▓ū┐┴─╠ņ╔ńĮ╗ / 126.1M /  ├└łDąŃąŃ╩ųÖC░µ╣┘ĘĮ░µv10.10.0ūŅą┬░µ
░▓ū┐özė░özŽ± / 174M /
├└łDąŃąŃ╩ųÖC░µ╣┘ĘĮ░µv10.10.0ūŅą┬░µ
░▓ū┐özė░özŽ± / 174M /  Į╗╣▄12123╣┘ĘĮūŅą┬░µ▒Š
Į╗╣▄12123╣┘ĘĮūŅą┬░µ▒Š
 ČČ궜O╦┘░µ╣┘ĘĮš²░µ
ČČ궜O╦┘░µ╣┘ĘĮš²░µ
 Ė▀Ą┬ĄžłDapp╣┘ĘĮ░µ
Ė▀Ą┬ĄžłDapp╣┘ĘĮ░µ
 ┐ß╣Ę궜Ęapp
┐ß╣Ę궜Ęapp
 ąĪ╝tĢ°2025ūŅą┬░µ
ąĪ╝tĢ°2025ūŅą┬░µ
 ŠW(w©Żng)ęūįŲ궜Ęapp
ŠW(w©Żng)ęūįŲ궜Ęapp
 SUAPP▓Õ╝■Äņ1.65
3.4M / ųą╬─
SUAPP▓Õ╝■Äņ1.65
3.4M / ųą╬─
 Äū║╬«ŗ░Õå╬╬─╝■į÷ÅŖ░µŠG╔½├Ō┘M░µ
82.3M / ųą╬─
Äū║╬«ŗ░Õå╬╬─╝■į÷ÅŖ░µŠG╔½├Ō┘M░µ
82.3M / ųą╬─
 DeliciousRetouch5.0ūŅą┬░µ
9.1M / ųą╬─
DeliciousRetouch5.0ūŅą┬░µ
9.1M / ųą╬─
 Wallpaper Engine(äėæB(t©żi)3D╠žą¦▄ø╝■╣żŠ▀)
267.5M / ųą╬─
Wallpaper Engine(äėæB(t©żi)3D╠žą¦▄ø╝■╣żŠ▀)
267.5M / ųą╬─
 coreldraw x8╣┘ĘĮųą╬─░µ
3KB / ųą╬─
coreldraw x8╣┘ĘĮųą╬─░µ
3KB / ųą╬─
 ╗╬×ęĢŅlū└├µļŖ─X░µ
51.7M / ųą╬─
╗╬×ęĢŅlū└├µļŖ─X░µ
51.7M / ųą╬─
 å¶┴©å¶┴©ūŅą┬░µ
216.3M / ░▓ū┐ė░ę¶ęĢ┬Ā
å¶┴©å¶┴©ūŅą┬░µ
216.3M / ░▓ū┐ė░ę¶ęĢ┬Ā
 ßößöapp╣┘ĘĮš²░µ
270.4M / ░▓ū┐▐k╣½╔╠äš(w©┤)
ßößöapp╣┘ĘĮš²░µ
270.4M / ░▓ū┐▐k╣½╔╠äš(w©┤)
 ╩ųÖCŠ®¢|app
103.3M / ░▓ū┐┘Å╬’ā×(y©Łu)╗▌
╩ųÖCŠ®¢|app
103.3M / ░▓ū┐┘Å╬’ā×(y©Łu)╗▌
 ░┘Č╚ĄžłD░▓ū┐░µ
118.9M / ░▓ū┐┬├ąąĮ╗═©
░┘Č╚ĄžłD░▓ū┐░µ
118.9M / ░▓ū┐┬├ąąĮ╗═©
¤ßķTįušō
ūŅą┬įušō